题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
设系统的闭环传递函数为G(s)=,当作用输入信号xi(t)=Rsin(ωt)时,试求该系统的稳态输出。
设系统的闭环传递函数为 ,当作用输入信号xi(t)=Rsin(ωt)时,试求该系统的稳态输出。
,当作用输入信号xi(t)=Rsin(ωt)时,试求该系统的稳态输出。
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
设系统的闭环传递函数为,当作用输入信号xi(t)=Rsin(ωt)时,试求该系统的稳态输出。
如果结果不匹配,请 联系老师 获取答案
 更多“设系统的闭环传递函数为G(s)=,当作用输入信号xi(t)=…”相关的问题
更多“设系统的闭环传递函数为G(s)=,当作用输入信号xi(t)=…”相关的问题
(2005年)由环节G(s)= 组成的单位反馈系统(即负反馈传递函数为1的闭环系统)单位斜坡输入的稳态速度误差系数为()。
组成的单位反馈系统(即负反馈传递函数为1的闭环系统)单位斜坡输入的稳态速度误差系数为()。
A.K/200
B.1/K
C.K
D.0
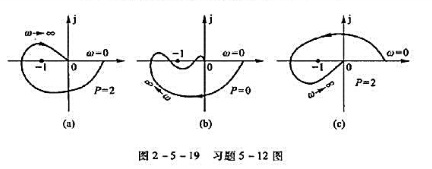
已知传递函数G(s)H(s)的幅相特性曲线如图2-5-19所示,图中P是G(s)H(s)分母中实部为正的根的数目。试说明传递函数 代表的闭环系统是否稳定,为什么?
代表的闭环系统是否稳定,为什么?
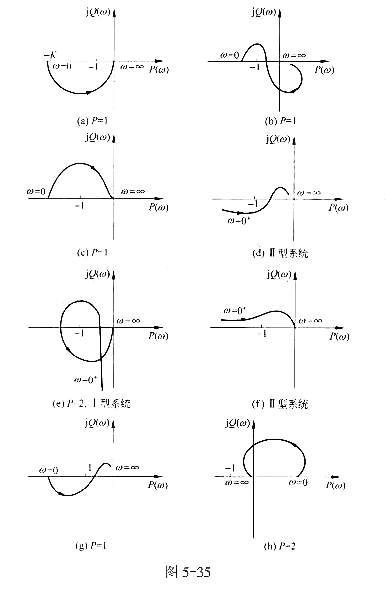
设系统的开环幅相频率特性如图5-35所示,写出开环传递函数的形式,并判断闭环系统是否稳定。图中P为开环传递函数在s右半平面的极点数。
某一位置随动系统,其开环传递函数为G(s)H(s)=K/s(5s+1),为了改善系统性能,分别采用在原系统中加比例及微分串联校正和速度反馈两种不同方案,校正前后的具体结构参数如图2-4-23所示。
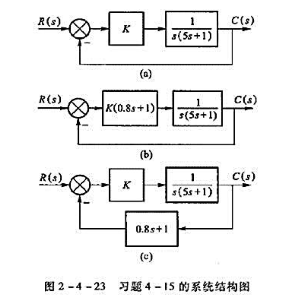
①试分别绘制这三个系统K从0→∞的闭环根轨迹图。
②比较两种校正对系统阶跃响应的影响。
设单位反馈控制系统的开环传递函数为 根轨迹图如题图所示。
根轨迹图如题图所示。
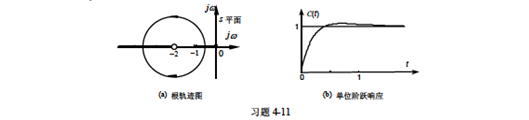
(1)当系统的阻尼振荡频率 时,试确定闭环主导极点的值与相应的增益值。
时,试确定闭环主导极点的值与相应的增益值。
(2)当系统的阻尼参数ζ=1时,其单位阶跃响应如题图所示,试分析超调量产生的原因。
设单位反馈系统的开环传递函数为

当输入信号x(t)为5rad/s的正弦信号时,求系统稳态误差。
A.xo(t)=4cos(t-15o)
B.xo(t)=2.828cos(t-75o)
C.xo(t)=2.828cos(t+15o)
D.xo(t)=4cos(t+15o)
A.G(z)D(z)
B.G(z)D(z)/[1+G(z)D(z)]
C.1/(1+G(z)D(z))
D.G(z)D(z)/[1-G(z)D(z)]