

 如果结果不匹配,请
如果结果不匹配,请 
 更多“桥梁变形监测方法有() ”相关的问题
更多“桥梁变形监测方法有() ”相关的问题
A.倾斜测量方法
B.激光准直测量方法
C.大地控制测量方法
D.地面立体摄影测量方法
下列不属于动态变形监测方法的是()。
A.准直测量方法
B.地面三维激光扫描方法
C.近景摄影测量方法
D.实时动态GPS测量方法

大地控制测量方法和地面立体摄影测量方法相比具有()的优点。
A.能够以网的形式进行测量
B.容易实现自动化
C.容易实现连续监测
D.外业工作量少
建筑物变形监测中,与全站仪测量方法相比,近景摄影测量方法的突出特点是()。
A.可同时获得大量变形点信息
B.可获得不同周期的变形量
C.可测定水平和垂直方向的变形
D.不需要设置基准点和工作基点
A.可同时获得大量变形点信息
B.可获得不同周期的变形量
C.可测定水平和垂直方向的变形
D.不需要设置基准点和工作基点
1)工程概况
××市××大厦基坑北侧与××地铁1号线隧道相邻,最近水平距离约9m。为了确保基坑支护顺利施工,保证××市地铁1号线正常运营,需对地铁1号线隧道进行变形监测,实时了解和掌握在基坑开挖过程中地铁隧道的变形情况,确保地铁隧道的安全。同时,可为基坑支护施工提供及时的反馈信息,为信息化施工提供科学的监测数据和报告。
××地铁1号线运营时间一般从早上6:00到晚上23:00,由于在运营时间测量人员无法下隧道测量,只能在夜间停运后测量。而白天是基坑施工的主要时间,也是监测的关键时间,因此,工程选择了基于自动全站仪开发的无接触式自动测量系统,实现了对运营地铁隧道结构三维变形位移的自动监测系统。
2)基准点及工作基点设置
(I)基准点的布设
监测区间线路离××车站及××车辆段均较近。本监测项目的基准点考虑选择在××车站内,选择采用有强制归心装置的观测墩。左出入段线和左线各设置3个基准点。为保证成果的可靠性,定期检测基准点的稳定性。
(2)工作基点的布设
为方便测量机器人自动搜寻目标,以及保证各监测点精度均匀,工作基站拟设置于监测范围中部的隧道侧墙上,托架伸出长度约400mm,左出入段线和左线各设置1个工作基点。基点网点可与地铁原基标控制系统联测或采用独立坐标系统。
(3)变形监测点的布设
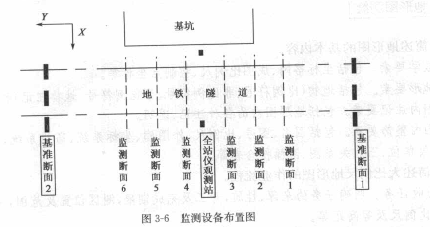
变形监测点设计要求的断面按每20m左右布设,每个断面在轨道附近的道床上布设2个监测点,即每个测断面布设2个监测点,全段线共布设6个观测断面。各断面观测点用连接件配小规格反射棱镜,用膨胀螺栓及云石胶锚固于监测位置的侧壁及道床的混凝土中,棱镜反射面指向工作基点,见图36。
3)测量机器人自动化监测
测量机器人自动化监测系统以基于1台测量机器人的有合作目标(照准棱镜)的变形监测系统为基本单元,可以由多个基本单元通过Internet联结起来组合而形成一个测量机器人远程网络监测系统,系统提供有线和无线两种组网方式。
(1)系统组成
远程无线遥控测量机器人变形监测和分析系统主要由3个单元组成:控制单元、无线通信单元和数据采集单元。控制单元一般安放在办公室内,通过具有固定lP的万维网发送指令和接收数据;无线通信单元与数据采集单元通过有线形式连接,将控制单元的指令转发给数据采集单元并将数据采集单元的数据简单处理后转发给控制中心;数据采集单元置于作业现场,根据控制单元的指令采集相应数据。
(2)硬件构成
远程无线遥控测量机器人变形监测和分析系统硬件主要由以下几项构成;
①测量机器人。测量机器人具有发动机驱动和目标自动识别等功能。测量机器人选用TS30,其静态测角精度为士0.5’’,测距精度为±(0.35mm+0.7ppm×D),自动目标识别的有效距离可达1000m,望远镜照准精度为2mm/500m。
②无线通信模块。实现系统控制中心与测量机器人之间的数据传输。
③系统控制中心。系统控制中心的主要任务之一是数据处理。
(3)软件构成
无线遥控测量机器人变形监测和分析系统软件主要由三部分组成:测量机器人机载软件、无线通信软件模块和控制中心软件包。
4)监测数据处理
测量机器人自动监测系统是根据全站仪的极坐标三维测量原理。由于该工程测量范围小,两端基准点之间的距离为150m左右,同时列车的运行,使得测量区域内的各点的气象条件较为一致。因此,通过一定的观测数据处理方法,可以消除由于不同测量周期测量时的气象变化所引起的测量误差。
5)小结
基于测量机器人的自动化监测系统,具有简便灵活、无人值守、实时动态的监测特点,克服了传统测量方法的不足,极大地提高了工作效率。监测系统为基坑开挖提供了准确、及时的地铁隧道变形数据,是运营地铁隧道变形监测的理想手段。随着我国城市地铁建设的大规模进行,自动监测已经成为必不可少的一种测量手段,发挥着日益重要的作用,随着地铁的发展,监测系统的前景应该不断发展和完善。
6)问题
(1)简述变形测量实施的程序与要求。
(2)简述全站仪自动跟踪测量的主要技术要求。
(3)监测项目的变形分析有哪些内容?
















