题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
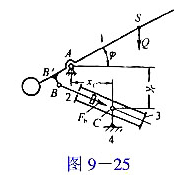
在图9-25所示的消防梯升降机构中,已知lBB´=200mm,AB´=400mm,lAS=1500mm、xc
在图9-25所示的消防梯升降机构中,已知lBB´=200mm,
AB´=400mm,lAS=1500mm、xc=yc=800mm,荷重Q=3000N,φ=30°,求应加于油缸活塞上的平衡力Fb及各运动副中的反力.
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
在图9-25所示的消防梯升降机构中,已知lBB´=200mm,
AB´=400mm,lAS=1500mm、xc=yc=800mm,荷重Q=3000N,φ=30°,求应加于油缸活塞上的平衡力Fb及各运动副中的反力.
如果结果不匹配,请 联系老师 获取答案
 更多“在图9-25所示的消防梯升降机构中,已知lBB´=200mm…”相关的问题
更多“在图9-25所示的消防梯升降机构中,已知lBB´=200mm…”相关的问题
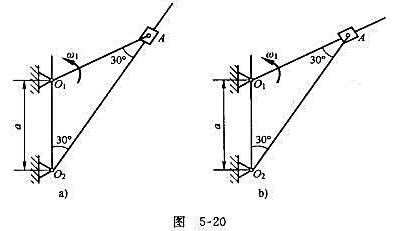
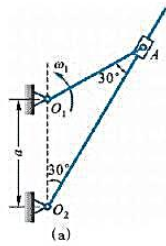
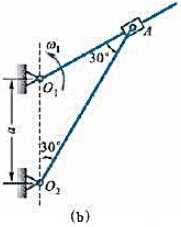
在图8-7a和图8-7b所示的2种机构中,已知O1O2=a=200mm,ω1=3rad/s。求图示位置时杆O2A的角速度。
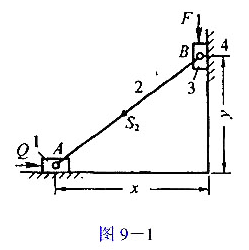
在图9-1所示机构中,已知:x=250mm,y=200mm,lAS2=128mm,F为驱动力,Q为有效阻力.m1=m3=2.75kg,m2=4.59kg,Js2=0.0l2kg·m2,又原动件3以等速v=5m/s向下移动,试确定作用在各构件上的惯性力.
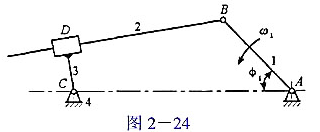
在图2-24示机构中,已知lAB=30mm,lAC=70mm,lCD=15mm,匀角速 1=10rad/s,转向如图2-25所示,
1=10rad/s,转向如图2-25所示, 1=45°.
1=45°.
(1)取u1=1mm/mm,绘机构运动简图;
(2)用相地运动图解法求构件3的角速度3和角速度 3.
3.
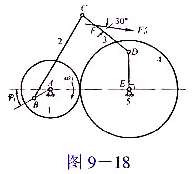
在图9-18所示机构中,已知:两齿轮的模数m=2mm,z1=38,z4=64,a=20°.
AB=25mm,lBC=127mm,lCD=76mm,lDE=50mm,φ1=30°.设ω1为顺时针方向.设作用在构件3上的总惯性力F´a=450N,lCF=20mm.其余构件上的惯性力以及各构件的重力均忽略不计.求需加于构件1上的平衡力偶矩和各运动副中的反力.
在图6-14所示操舵装置的周转轮系中,已知齿数z1=z4.(1)自动操舵时刹住舵轮A,这时复式电动机开动,执行电动机再通过行星轮系1-2-3-4-5及一些其他机构进行操舵,求传动比i15;(2)手动操舵时用控制杆锁住复式电动机,故轮1不动,这时松开舵轮A,并用它通过行星轮系4-3-2-1-5及一些其他机构进行操舵,求传动比i45.
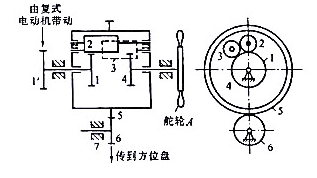
图6-14
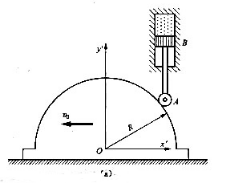
杆AB沿铅垂方向运动。当运动开始时,活塞杆A端在凸轮的最高点处。已知凸轮的半径R= 80mm,求活塞B相对于地面和相对于凸轮的运动方程和速度。
件的质量为m1=m2=m3=1kg,各构件的质心均位于铰链间的中点,构件2对其质心轴的转动惯量Js2=0.005kg·m2,曲柄的等角速度ω1=20rad/s.当曲柄和摇杆的轴线在铅直位置而连杆的轴线在水平位置时,用质量代换法求各构件的总惯性力.