

 如果结果不匹配,请
如果结果不匹配,请 
 更多“对于输入信号为单位斜坡时设计的最少拍无差系统,输入单位加速度…”相关的问题
更多“对于输入信号为单位斜坡时设计的最少拍无差系统,输入单位加速度…”相关的问题
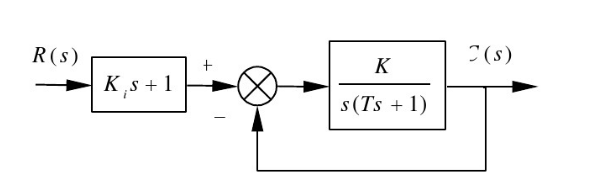
随动控制系统的方框图如图所示。若输入信号为r(t)=at(a为任意常数)。试证明通过适当地调节Ki的值,该系统对于斜坡输入的响应的稳态误差能达到零。
算法设计:对于给定的n个正整数,设计一个算法,用最少的无优先级运算次数产生整数m.
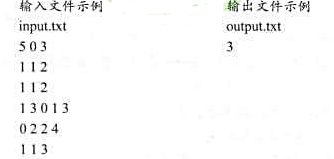
数据输入:由文件input.txt给出输入数据.第1行有2个正整数n和m.第2行是给定的用于运算的n个正整数.
结果输出:将计算的产生整数m的最少无优先级运算次数以及最优无优先级运算表达式输出到文件output.txt.

单位负反馈控制系统的开环传递函数

输入信号为r(t)=(a+bt)·1(t)(a,b为常数)。试求系统稳态误差enn≤ε时各参数应保持的关系(e=r-c)。
算法设计:对于给定的n个正整数,设计一个优先队列式分支限界法,用最少的无优先级运算次数产生整数m.
数据输入:由文件input.txt给出输入数据.第1行有2个正整数n和m.第2行是给定的用于运算的n个正整数.
结果输出:将计算的产生整数m的最少无优先级运算次数以及最优无优先级运算表达式输出到文件output.txt.

算法设计:对于给定的树T,以及障碍物在树T中的分布情况,计算机器人从起点s到终点t的最少移动次数.
数据输入:由文件input.txt提供输入数据.文件的第1行有3个正整数n,s和t,分别表示树T的顶点数,起点s的编号和终点t的编号.
接下来的n行分别对应于树T中编号为0,1,...,n-1的项点.每行的第1个整数h表示顶点的初始状态,当h+1时表示该顶点为空顶点,当h=0时表示该顶点为满顶点,其中已有一个障碍物.第2个数k表示有k个顶点与该项点相连.接下来的k个数是与该顶点相连的顶点编号.
结果输出:将计算出的机器人最少移动次数输出到文件output.txt.如果无法将机器人从起点s移动到终点t,则输出“NoSolution!"
已知当输入信号为 时,某连续时间因果LTI系统的输出信号为
时,某连续时间因果LTI系统的输出信号为 .试求:
.试求:
(1)该系统的单位冲激响应h(t),并画出h(t)的波形;
(2)当该系统输入为 时的输出信号y1(t),并画出y1(t)的波形.
时的输出信号y1(t),并画出y1(t)的波形.
已知单位反馈系统I, II, II均为最小相位系统,其开环对数幅频特性的渐近线分别在图5-7中给出,
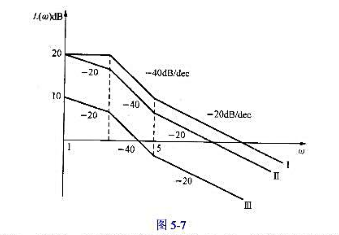
试完成:
(1)求出各系统分别对单位阶跃输入和单位斜坡输入时的稳态误差;
(2)分析比较系统II和系统对于阶跃输入的超调量。
















