题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
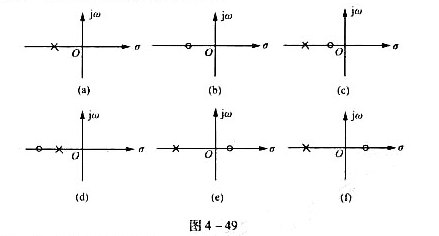
某因果数字滤波器的零、极点如图10-25(a)所示,并已知其.试求:(1)它的系统函数H(z)及其收敛域,且
某因果数字滤波器的零、极点如图10-25(a)所示,并已知其.试求:(1)它的系统函数H(z)及其收敛域,且
某因果数字滤波器的零、极点如图10-25(a)所示,并已知其 .试求:
.试求:
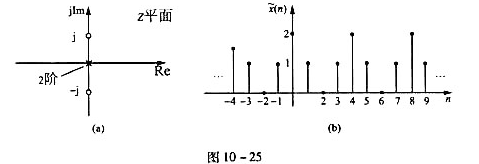
(1)它的系统函数H(z)及其收敛域,且回答它是IIR还是FIR的什么类型(低通、高通、带通、带阻或全通)滤波器?
(2)写出图10-25(b)所示周期信号 的表达式,并求其离散傅里叶级数的系数;
的表达式,并求其离散傅里叶级数的系数;
(3)该滤波器对周期输入的响应y[n].
查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“某因果数字滤波器的零、极点如图10-25(a)所示,并已知其…”相关的问题
更多“某因果数字滤波器的零、极点如图10-25(a)所示,并已知其…”相关的问题
 试求两种补偿时所需的电容值.设密勒补偿时
试求两种补偿时所需的电容值.设密勒补偿时 各级的输入和输出电阻对电路影响忽略不计.
各级的输入和输出电阻对电路影响忽略不计.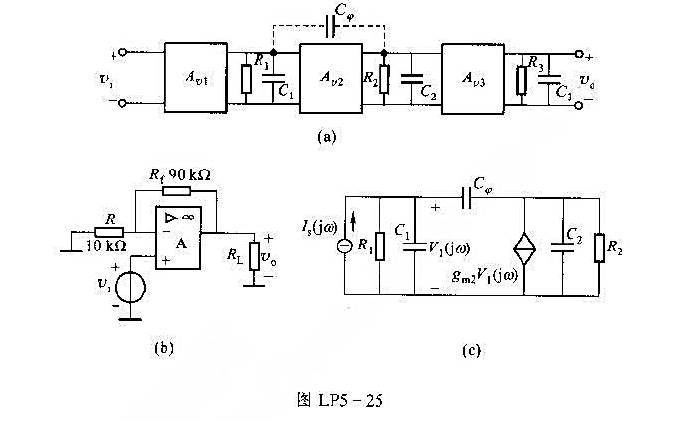



 .
.