题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
如果事务T获得了数据对象Q上的S锁,则其他事务在数据对象Q上()。
A.可加X锁
B.可加S锁
C.可加任何锁
D.不能加任何锁
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
A.可加X锁
B.可加S锁
C.可加任何锁
D.不能加任何锁
如果结果不匹配,请 联系老师 获取答案
 更多“如果事务T获得了数据对象Q上的S锁,则其他事务在数据对象Q上…”相关的问题
更多“如果事务T获得了数据对象Q上的S锁,则其他事务在数据对象Q上…”相关的问题
A.q=16~18L/(s.m2),t=8~6min
B.q=10~13L/(s.m2),t=6~4min
C.q=18~20L/(s.m2),t=10~8min
D.q=13~16L/(s.m2),t=8~6min
设 且满足
且满足

其中c≥0,和Q={(x,t)|0xL,t0}.试证明:如果u在 上存在非负最大值,则u必在抛物边界
上存在非负最大值,则u必在抛物边界 上达到它在
上达到它在 上的非负最大值.
上的非负最大值.
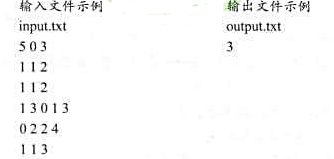
算法设计:对于给定的树T,以及障碍物在树T中的分布情况,计算机器人从起点s到终点t的最少移动次数.
数据输入:由文件input.txt提供输入数据.文件的第1行有3个正整数n,s和t,分别表示树T的顶点数,起点s的编号和终点t的编号.
接下来的n行分别对应于树T中编号为0,1,...,n-1的项点.每行的第1个整数h表示顶点的初始状态,当h+1时表示该顶点为空顶点,当h=0时表示该顶点为满顶点,其中已有一个障碍物.第2个数k表示有k个顶点与该项点相连.接下来的k个数是与该顶点相连的顶点编号.
结果输出:将计算出的机器人最少移动次数输出到文件output.txt.如果无法将机器人从起点s移动到终点t,则输出“NoSolution!"
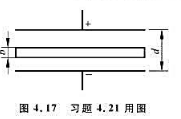
一个平行板电容器,板面积为S,板间距为d.如图4.17所示。
(1)充电后保持其电量Q不变,将一块厚为b的金属板平行于两极板插入,与金属板插入之前相比,电容器储能增加多少?
(2)导体板插入时,外力(非静电力)对它做功还是电场力做功?是被吸入还是需要推入?
(3)如果充电后保持电容器的电压U不变,则(1)(2)两问结果又如何?