 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
基点及变形观测点的布设要求中,基准点宜选在地基稳固、便于监测和不受影响的地点,一个测区的基准
点不应少于()个。
A. 2
B. 1
C. 3
D. 4
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
A. 2
B. 1
C. 3
D. 4
如果结果不匹配,请 联系老师 获取答案
 更多“基点及变形观测点的布设要求中,基准点宜选在地基稳固、便于监测…”相关的问题
更多“基点及变形观测点的布设要求中,基准点宜选在地基稳固、便于监测…”相关的问题
A.一个测区的基准点不应少于2个
B. 变形观测点应选择在能反映变形体变形特征位置
C. 变形观测点应选择在既能反映变形体变形特征又便于监测的位置
D. 基准点宜选在地基稳固、便于监测和不受影响的地点
E. 一个测区的基准点不应少于3个
18分)
某测绘单位承担某大厦建设过程中的变形监测任务。该大厦位于城市的中心区,设计楼层80层(含地下4层),楼高约360m,总建筑面积约250 000m2,为钢结构地标性建筑物。
已有资料:
①建筑物总平面图、施工设计图及相关说明文档;
②施工首级GPS控制网资料(城市独立坐标系);
③周边地区一、二等水准点资料(1985国家高程基准);
④其他相关资料。
投入的主要测量设备:
①0.5″级全站仪 1台套
②双频GPS接收机 5台套
③精度为1/10万的激光垂准仪 1台套
④DS05型水准仪 1台套
⑤50m钢卷尺 1个
测绘单位按规范要求在建筑物基坑周边外埋设了两个垂直位移监测工作基点和四个水平位移监测工作基点。垂直位移监测工作基点为钢管标,水平位移监测工作基点为带有强制对中装置的观测墩,其中两个建于周边10层楼的楼顶,两个建于地面上。
变形监测的内容包括基坑支护边坡顶部水平位移及垂直位移、基坑回弹测量、基础沉降监测及主体工程倾斜测量、基坑周边50m范围内建筑物的沉降监测等。
问题:
1、为测定垂直位移监测工作基点的高程,应布设垂直位移监测基准点,简述基准点布设的位置和数量要求以及垂直位移监测的等级要求。
2、在投入的主要测量设备中,选择一种最适合用于监测水平位移监测工作基点稳定性的设备,并说明观测时的注意事项。
3、简述变形监测成果中图和表的主要内容。
1)工程概况
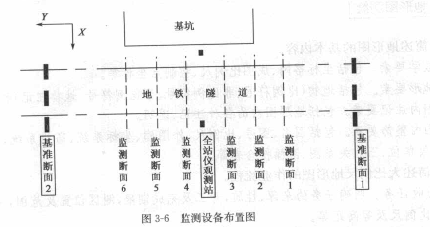
××市××大厦基坑北侧与××地铁1号线隧道相邻,最近水平距离约9m。为了确保基坑支护顺利施工,保证××市地铁1号线正常运营,需对地铁1号线隧道进行变形监测,实时了解和掌握在基坑开挖过程中地铁隧道的变形情况,确保地铁隧道的安全。同时,可为基坑支护施工提供及时的反馈信息,为信息化施工提供科学的监测数据和报告。
××地铁1号线运营时间一般从早上6:00到晚上23:00,由于在运营时间测量人员无法下隧道测量,只能在夜间停运后测量。而白天是基坑施工的主要时间,也是监测的关键时间,因此,工程选择了基于自动全站仪开发的无接触式自动测量系统,实现了对运营地铁隧道结构三维变形位移的自动监测系统。
2)基准点及工作基点设置
(I)基准点的布设
监测区间线路离××车站及××车辆段均较近。本监测项目的基准点考虑选择在××车站内,选择采用有强制归心装置的观测墩。左出入段线和左线各设置3个基准点。为保证成果的可靠性,定期检测基准点的稳定性。
(2)工作基点的布设
为方便测量机器人自动搜寻目标,以及保证各监测点精度均匀,工作基站拟设置于监测范围中部的隧道侧墙上,托架伸出长度约400mm,左出入段线和左线各设置1个工作基点。基点网点可与地铁原基标控制系统联测或采用独立坐标系统。
(3)变形监测点的布设
变形监测点设计要求的断面按每20m左右布设,每个断面在轨道附近的道床上布设2个监测点,即每个测断面布设2个监测点,全段线共布设6个观测断面。各断面观测点用连接件配小规格反射棱镜,用膨胀螺栓及云石胶锚固于监测位置的侧壁及道床的混凝土中,棱镜反射面指向工作基点,见图36。
3)测量机器人自动化监测
测量机器人自动化监测系统以基于1台测量机器人的有合作目标(照准棱镜)的变形监测系统为基本单元,可以由多个基本单元通过Internet联结起来组合而形成一个测量机器人远程网络监测系统,系统提供有线和无线两种组网方式。
(1)系统组成
远程无线遥控测量机器人变形监测和分析系统主要由3个单元组成:控制单元、无线通信单元和数据采集单元。控制单元一般安放在办公室内,通过具有固定lP的万维网发送指令和接收数据;无线通信单元与数据采集单元通过有线形式连接,将控制单元的指令转发给数据采集单元并将数据采集单元的数据简单处理后转发给控制中心;数据采集单元置于作业现场,根据控制单元的指令采集相应数据。
(2)硬件构成
远程无线遥控测量机器人变形监测和分析系统硬件主要由以下几项构成;
①测量机器人。测量机器人具有发动机驱动和目标自动识别等功能。测量机器人选用TS30,其静态测角精度为士0.5’’,测距精度为±(0.35mm+0.7ppm×D),自动目标识别的有效距离可达1000m,望远镜照准精度为2mm/500m。
②无线通信模块。实现系统控制中心与测量机器人之间的数据传输。
③系统控制中心。系统控制中心的主要任务之一是数据处理。
(3)软件构成
无线遥控测量机器人变形监测和分析系统软件主要由三部分组成:测量机器人机载软件、无线通信软件模块和控制中心软件包。
4)监测数据处理
测量机器人自动监测系统是根据全站仪的极坐标三维测量原理。由于该工程测量范围小,两端基准点之间的距离为150m左右,同时列车的运行,使得测量区域内的各点的气象条件较为一致。因此,通过一定的观测数据处理方法,可以消除由于不同测量周期测量时的气象变化所引起的测量误差。
5)小结
基于测量机器人的自动化监测系统,具有简便灵活、无人值守、实时动态的监测特点,克服了传统测量方法的不足,极大地提高了工作效率。监测系统为基坑开挖提供了准确、及时的地铁隧道变形数据,是运营地铁隧道变形监测的理想手段。随着我国城市地铁建设的大规模进行,自动监测已经成为必不可少的一种测量手段,发挥着日益重要的作用,随着地铁的发展,监测系统的前景应该不断发展和完善。
6)问题
(1)简述变形测量实施的程序与要求。
(2)简述全站仪自动跟踪测量的主要技术要求。
(3)监测项目的变形分析有哪些内容?
1)工程概况
××地铁一期工程南北线(玄武门站至许府巷站)区间圆形隧道(左、右线)与××公路隧道在新模范马路与中央路的丁字路口立体交叉,××公路隧道从地铁区间隧道的上方穿越,并先于地铁盾构隧道施工。××公路隧道在城墙西段采用明挖顺作法施工,围护结构采用SMW工法,主体结构在与地铁隧道相交段为钢筋混凝土箱体结构。主体结构底板为850mm厚钢筋混凝土,垫层为200mm厚素混凝土,并沿××公路隧道纵向设抗拔桩。
地铁第一台盾构机第一次从许府巷站南端头左线出发向玄武湖站方向掘进,并于同年10月中旬反向从地铁右线再次穿过××公路隧道。在立体交叉段,地铁盾构与××公路隧道的净间距约为1~2m。由北向南,地铁隧道左线与××公路隧道净间距为1.053—1.760,右线与××公路隧道净间距仅为1.004~1.711m。在××公路隧道和地铁盾构隧道交叉段,两者之间的最小净距仅为1.004m,最大净距也不过1.760m。当该段××公路隧道建好后,地铁盾构从××公路隧道下面穿过,将会扰动周围土体,××公路隧道底板的地基反力会有变化,从而影响××公路隧道主体结构受力,可能会产生不利的后果。根据x×公路隧道建设指挥部要求,需在地铁盾构穿过××公路隧道时,实时监测地铁盾构施工对××公路隧道的影响,从而指导施工,做到信息化施工。
2)监测项目
(1)地表沉降监测;
(z)××公路隧道底板沉降。
3)监测方法
(1)地表沉降监测
①监测目的。
掌握盾构推进时地表沉降规律,盾构推进对地表和地面周围环境的影响程度和影响范围,以指导施工和确保施工安全。
②测点布设。
距××公路隧道结构边线30m范围(重点监控地段)、金川河地段沿盾构隧道轴线纵向每隔10m布设一个地表测点,其余地段每隔20m布设一个监测点(有房屋地段在空地处布设)。
同时,在盾构隧道两侧(约17m)范围内布设地表横向沉陷槽测点,沿××公路隧道中线和金川河边各布设一组。测点埋设主要为工作基点与测点的埋设。工作基点埋设在沉降影响范围以外的稳定区域,并在视野开阔的地方,以利于观测,至少埋设2个工作基点,以便于工作基点互相检核,并且工作基点应与附近水准点联测取得原始高程。
(2)××公路隧道底板监测
①监测目的。
通过实时监测,掌握盾构推进××公路隧道底板的沉降和隆起情况,以指导施工和保证施工安全。监测要求为:当地铁盾构掘进距××公路隧道结构线50m范围内时,实时监测××公路隧道底板下地基反力和土体位移、底板面位移及底板应力变化情况。控制的标准为:隆起值为10mm.允许沉降值为30mm。以控制标准的70%作为预警值。
②监测点布设。
工作基点布设:工作基点是沉降和隆起测试的基础,本次测试共埋设3个工作基点,距离地铁盾构左线中线50m以外。其中,BMO为隧道施工的水准点,与BM1、BM2-起构成首级控制网并提供原始高程。工作基点和观测点的埋设均采用在隧道底板钻孔,然后埋入直径16~18mm、长100—200mm的膨胀螺栓或半圆头钢筋制成。
本次沉降和隆起观测的观测点重点布设在××公路隧道底板上。在隧道的南、北线上分别布设三个断面,断面号从北到南分别为NI、NⅡ、NⅢ和SI、SⅡ、SⅢ,每个断面上从西到东的观测点分别用1—13表示。各个断面上的点布设在以地铁盾构为中心的两侧。观测点布设总数为13×6-78个点。
4)问题
(1)简述变形监测工作的特点。
(2)简述变形监测网的网点布设要求。
(3)变形观测数据可分为哪几种?简述变形观测数据处理工作内容。
1)工程概述
××站××站区段盾构施工属于××地铁×号线一期工程,由一条盾构区间和两座车站组成。区间盾构隧道左、右线长度分别为2135m和2121m。区间盾构和车站采取平行施工。区间安排两台盾构机,从盾构始发井始发,向南掘进。本次始发两台盾构机将先后间隔100m,左线先行。
右线在里程K16+254.21m处将旁边一栋12层高的建筑物,即南小街8号居民楼。由于此楼使用时间较长,楼体多处有拉裂现象,存在安全隐患。因此,在盾构穿越期间要对其进行变形监测,以确保安全。
2)工程地质条件
南小街8号居民楼地面标高约38.8m,其地层(工程勘探结果)自上而下依次为:
(1)粉土填土①层,杂填土①1,层;层厚1.8~5.3m。
(2)粉土③层,粉质黏土③1,层;层厚3.6~7.4m。
(3)粉质黏土⑥层,粉土⑥2层,中粗砂⑦1层,粉细砂⑦2层;层厚7.0~14.5m。
(4)粉质黏土⑧层,卵石圆砾⑦层,中粗砂⑨1层,黏土⑩1层;层厚10m~11.7m。
3)监测项目
(1)地表沉降监测
在北小街8号楼前—南小街8号楼(从K16+000—K16+450范围内)沿每条盾构隧道中线,每隔5m布设一个地面沉降测点。每隔25m布设一个小断面,每个断面布设5个点;每隔50m布设一个大断面,每个大断面布设10个点。
(2)建筑物沉降监测
根据设计资料,在南小街8号居民楼和北小街8号居民楼上各布设6个建筑物沉降点。
在南小街8号居民楼的附近再增加布设地面沉降点12个。
4)监测实施方案
(1)监测仪器:电子水准仪DL-101C、铟钢条形码尺,仪器标称精度为士0.4mm/km。
(2)监测实施方法。
①基点布设:在远离施工区相对稳定区域布设水准基点4个,在靠近施工区域布设工作基点6个。水准基点与工作基点构成闭合水准环线进行联测,严密平差取得基准点高程成果。
②地表沉降测点埋设:在开挖前15天用冲击钻在地表路面钻孔,要求穿透混凝土路面,然后根据路面混凝土层厚度打入长10—1000px、直径16mm钢筋测点(在较坚硬的地面可选用膨胀螺栓),并用水泥砂浆回填密实,在穿过混凝土路面层部分使用套管隔离,保证钢筋与下部土体固结而与上部路面分离,在不影响交通的情况下测点可高出地面2~5mm。测点周围用红油漆做标记,并用红油漆编号做出测点标志。
③建筑物沉降测点埋设:用冲击钻在建筑物的基础或墙上钻孔,然后放入直径20~
30mm,长200—300mm的半圆头弯曲钢筋,四周用水泥砂浆填实。测点的埋设高度应方便观测,对测点应采取保护措施,避免在施工过程中受到破坏。周围用红油漆做标记,并用红油漆编号做出观测标志。
④测量方法:采用精密水准测量方法。观测时各项限差应严格控制在规定额度之内,
对不在水准路线上的观测点,一个测站不宜超过3个,超过时应重读后视点读数,以作核对。首次观测应对测点进行连续3次观测,3次高程之差应小于±0.5mm,取平均值作为初始值。
⑤监测频率:当开挖面与量测面距离<2B时(B为隧道宽度),1次/天;当开挖面与量测面距离<5B时,1次/2天;当开挖面与量测面距离>5B时,1次/周。
5)拟提交成果清单
(1)地表沉降变化曲线图、沉降变化速度曲线图。
(2)建筑物沉降变化曲线图、沉降变化速度曲线图。
6)问题
(1)变形监测包括几何量监测和物理量监测,简述几何量监测的内容。
(2)简述变形监测方案设计的内容。
(3)各期的变形监测应满足哪些要求?
(4)本工程拟提交成果清单是否齐全?如不齐全,请补充完善。
A.监测控制点的精度应不低于四等网的标准
B.基点必须建立在变形区以内稳固的基岩上
C.测点应与变形体牢固结合
D.滑坡测点宜设在滑动量小的部位
E.山体裂缝观测点应埋设在裂缝两侧
18分)
某城市建设一座50层的综合大楼,距离1号运营地铁线的最近水平距离为40m,需对开挖基坑、综合大楼及相邻的地铁隧道进行变形监测,变形监测按照《工程测量规范》(GB 50026—2007)和《城市轨道交通工程测量规范》(GB 50308—2008)中变形监测Ⅱ等精度要求实施。
开挖基坑监测:基坑上边缘尺寸为100m×80m,开挖深度为25m,在基坑周边布设了四个工作基点A、B、C、D,变形监测点布设在基坑壁的顶部、中部和底部;监测内容包括水平位移、垂直位移和基坑回填等;基坑开挖初期监测频率为1次/周,随着基坑开挖深度的增加,相应增加监测频率;监测从基坑开挖开始至基坑回填结束。监测到第12期时,发现由工作基点A测量的所有监测点整体向上位移,而由工作基点B、C、D测量的监测点整体下沉或不变。
综合大楼监测:大楼的监测点布设顶部、中部和基础上,沿主墙角和立柱布设;监测内容包括基础沉降、基础倾斜和大楼倾斜等;监测频率为1次/周;监测从基础施工开始至大楼竣工后1年。
地铁隧道监测:监测范围为综合大楼相邻的200m区段;监测内容包括隧道拱顶下沉、衬砌结构收敛变形及侧墙位移等;变形监测点按断面布设,断面间距为5m,每个断面上布设5个监测点,每个点上安装圆棱镜,采用2台高精度自动全站仪自动测量;监测频率为2次/天;隧道监测从基坑开挖前一个月至大楼竣工后1年。
监测数据采用SQL数据库进行管理,数据库表单包括周期表单、工程表单、原始数据表单、测量仪器表单、坐标与高程表单等。监测成果包含监测点坐标数据、变形过程线及成果分析等。
问题:
1、该段地铁隧道变形监测中,总共需布设多少个断面监测点?对两台高精度自动全站 仪的安置位置有什么要求?
2、利用数据库生成监测点的变形过程线时,需要调用到哪些表单?并说明理由。
3、从测量角度判断有工作基点A测量的基坑监测点向上位移的原因,并提出验证方法。
1)滑坡体介绍
××滑坡体位于长江左岸,前缘高程139m,后缘高程400m,滑坡面积约30万m2。1954年该滑坡临江地带200m高程以下部分曾崩滑人江,之后每遇特大暴雨即有崩滑迹象。2002年以来,滑体300~400m高程地段出现多条横向裂缝,最长约100m,40余户农户被迫于2003年7月搬出。
2)滑坡GPS监测网布设
GPS监测网由基准网和变形网构成。首级网为监测系统的基准网,二级网由滑坡监测点组成。在基准网控制下,比较滑坡监测点各期观测量与首期观测值的坐标差值,即可判断滑坡稳定性。
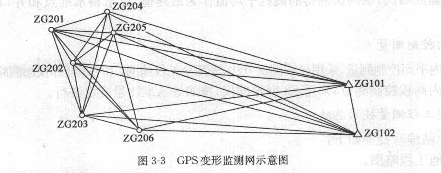
滑坡监测点根据滑坡体特点来选择,这些点要能反映滑坡体整体变形方向和变形量,又要能反映滑坡体范围变形速率。同时,每个点还要考虑接收卫星信号情况,测点上空不要有大面积遮挡物。为此,根据对现场条件的野外勘察,按照布网原则布设了如图3-3所示的GPS变形监测网。其中,ZG101~ZG102为布设在该滑坡体以外稳定基岩上的基准点,ZG201一ZG206为布设在本滑坡体外上的6个监测点。各点之间的平均距离为280.3m,最长距离为558.562m,最短距离为46.285m。基准点和监测点上都埋设了观测墩,并配有强制对中装置。
3)数据采集与数据处理
在对该滑坡进行监测过程中,分别在2008年9月和2008年11月对其进行了两期监测。
外业观测的仪器:基准点用2台双频GPS接收机,监测点用6台单频GPS接收机。观测方法:采用静态相对定位的方法进行野外数据采集,数据采样率为15s。观测时,基准点上观测3个时段,每时段4h;监测点上连续观测2h。
观测完毕后,利用随机软件进行解算。数据的解算包括闭合环的检验和GPS网平差等。
本监测网两期观测数据经约束平差后的各项精度指标都能达到预期目标,在精度、可靠性和置信度三个方面均达到了预期的设计要求。
4)监测结果分析
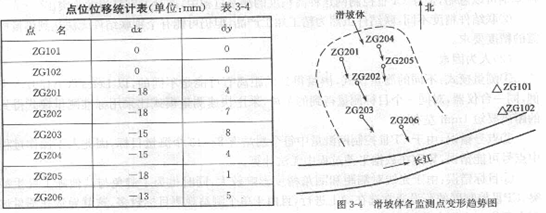
得到滑坡监测点两期观测坐标后,可得到该滑坡两期变形信息,统计结果如表3-4所示。
从表3-4中数据可以看出:该滑坡的6个监测点均发生了不同程度的变形,其中变形最大的位移点为ZG202(dx=-18mm,dy=7mm)。同时,由图3-4可以看出该滑坡6个监测点的变形方向基本一致(与长江水流方向垂直),有向南滑动的趋势。
5)问题
(1)变形监测有哪些方法?
(2)简述滑坡监测变形观测点位的布设规定。
(3)变形观测资料分析的常用方法有哪些?
(4)出现何种异常情况应即刻通知建设单位、施工单位和有关管理部门?
变形监测中,布设于待测目标体上并能反映变形特征的点为()。
A.基准点
B.工作基点
C.变形点
D.连接点

















