题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
若系统的传递函数在右半平面上没有零点和极点,则该系统称作()系统。
A、最小相位
B、非最小相位
C、不稳定
D、振荡
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
A、最小相位
B、非最小相位
C、不稳定
D、振荡
如果结果不匹配,请 联系老师 获取答案
 更多“若系统的传递函数在右半平面上没有零点和极点,则该系统称作()…”相关的问题
更多“若系统的传递函数在右半平面上没有零点和极点,则该系统称作()…”相关的问题
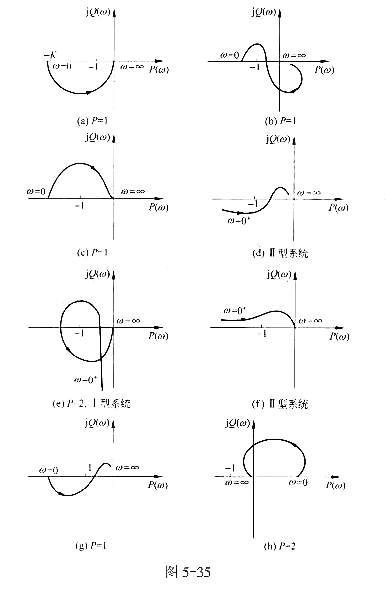
设系统的开环幅相频率特性如图5-35所示,写出开环传递函数的形式,并判断闭环系统是否稳定。图中P为开环传递函数在s右半平面的极点数。
所谓最小相位系统是指()。
A.系统闭环传递函数的极点均在S平面左半平面
B.系统开环传递函数的所有零点和极点均在S平面左半平面
C.系统闭环传递函数的所有零点和极点均在S平面右半平面
D.系统开环传递函数的所有零点和极点均在S平面右半平面
设线性时不变系统的系统函数H(z)为
 (1)在z平面上用几何法证明该系统是全通网络,即|H(ejω)|=常数; (2)参数α如何取值,才能使系统因果稳定?画出其极零点分布及收敛域。
(1)在z平面上用几何法证明该系统是全通网络,即|H(ejω)|=常数; (2)参数α如何取值,才能使系统因果稳定?画出其极零点分布及收敛域。
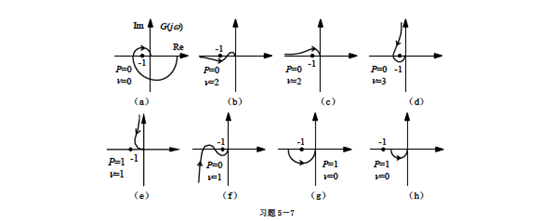
当ω从0到+∞变化时的系统开环频率特性G(jω)H(jω)如题4图所示。K表示开环增益。Р表示开环系统极点在右半平面上的数目。v表示系统含有的积分环节的个数。试确定闭环系统稳定的K值的范围。
(重庆大学2006-2007学年第l学期期末考试试题)设单位负反馈系统的开环传递函数为:
 试求: (1)试绘制系统根轨迹的大致图形(需给出相应的计算),并讨论参数K对系统稳定性的影响。 (2)若增加一个零点z=-1,此时根轨迹的形状如何?该零点对系统稳定性有什么影响。 (3)在(2)中,若增加的零点是z=-3,此时根轨迹的形状又如何?有什么初步结论?
试求: (1)试绘制系统根轨迹的大致图形(需给出相应的计算),并讨论参数K对系统稳定性的影响。 (2)若增加一个零点z=-1,此时根轨迹的形状如何?该零点对系统稳定性有什么影响。 (3)在(2)中,若增加的零点是z=-3,此时根轨迹的形状又如何?有什么初步结论?
A.闭环系统特征方程的所有根都是负实数或具有负实部的复数,线性系统稳定
B.系统闭环传递函数的极点均位于S平面的左半平面,线性系统稳定
C.特征方程中有一对共轭虚根或有极点位于S平面的虚轴,线性系统临界稳定
D.特征方程中的根或有极点位于S右半平面时,线性系统稳定
数幅频渐近曲线分别如图2-6-1中L0和L1、L2所示。并设G0(s)、Gc1(s)、Gc2(s)都没有右半平面的零、极点。现用Gc1(s)和Gc2(s)分别对系统进行串联校正。
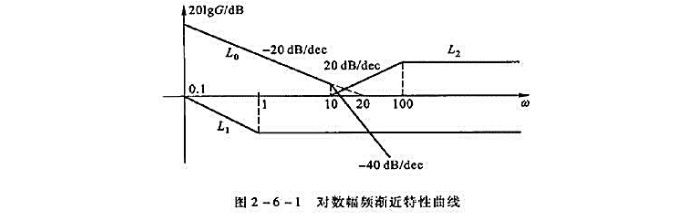
要求写出Gc1(s)G0(s),Gc2(s)G0(s)的表达式并画出它们相应的对数幅频渐近曲线,比较两种校正方案的优缺点。