题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知工作波长为8mm,采用矩形波导(a×b=7.112×3.556mm2的TE10模传输,现需转换到圆波导的模传输,要求两波导中
已知工作波长为8mm,采用矩形波导(a×b=7.112×3.556mm2的TE10模传输,现需转换到圆波导的TE01模传输,要求两波导中相速相等,问圆波导的直径D为多少?
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已知工作波长为8mm,采用矩形波导(a×b=7.112×3.556mm2的TE10模传输,现需转换到圆波导的TE01模传输,要求两波导中相速相等,问圆波导的直径D为多少?
如果结果不匹配,请 联系老师 获取答案
 更多“已知工作波长为8mm,采用矩形波导(a×b=7.112×3.…”相关的问题
更多“已知工作波长为8mm,采用矩形波导(a×b=7.112×3.…”相关的问题
已知矩形波导的横截面尺寸为a×b=23mm×10mm,试求当工作波长λ=10mm时,波 导中能传输哪些波型?λ=30mm呢?
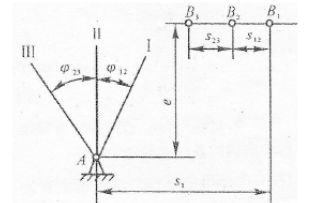
图(a)所示为某仪表中采用的摇杆滑块机构,若已知滑块和摇杆对应位置为S1=36mm,S12=8mm,S23=9mm,φ12=25°,φ23=35°,摇杆的第Ⅱ位置在铅垂方向上。滑块上铰链点取在B点,偏距e=28mm,试确定曲柄和连杆长度。
A.表示传输距离为40km,传输速率为622Mbit/s,采用G.652光纤、工作波长为1310nm
B.表示传输距离为40km,传输速率为622Mbit/s,采用G.652光纤、工作波长为1550nm
C.表示传输距离为40km,传输速率为622Mbit/s,采用G.653光纤、工作波长为1550nm
D.表示传输距离为40km,传输速率为622Mbit/s,采用G.653光纤、工作波长为1310nm
A.0.078A/m㎡
B.0.147A/m㎡
C.0.165A/m㎡
D.0.226A/m㎡
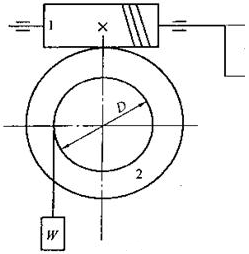
如下图所示手动绞车采用蜗杆传动,已知模数m=8mm,螺杆直径d1=80mm,蜗杆头数z1=1,蜗轮齿数z2=40,卷简直径D=200mm。求:
(1)重物上升1m,手柄应转多少圈?
(2)若蜗杆与蜗轮齿面之间的当量摩擦因数fv=0.2,此机构是否自锁?
(3)标出重物上升时,蜗轮圆周力Ft2方向。
有一摆动滚子推杆盘形凸轮机构如下图所示,已知lOA=60mm,r0=25mm,lAB=50mm,rt=8mm。凸轮顺时针方向等速转动,要求当凸轮转过180°时,推杆以余弦加速度运动向上摆动25°;转过一周中的其余角度时,推杆以正弦加速度运动摆回到原位置。试以作图法设计凸轮的工作廓线。

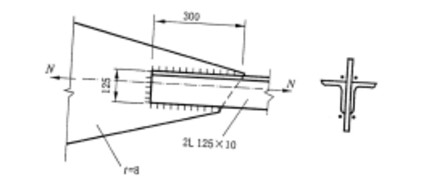
确定图11-24所示承受静态轴心力的三面围焊连接的承载力及肢尖焊缝的长度,已知角钢为2L125X10,与厚度为8mm的节点板连接,其搭接长度为300mm,焊脚尺寸hf=8mm,钢材为Q235-B,手工焊,焊条为E43型。