 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
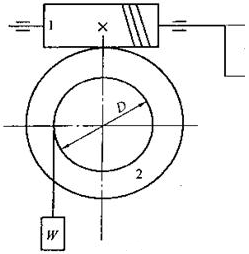
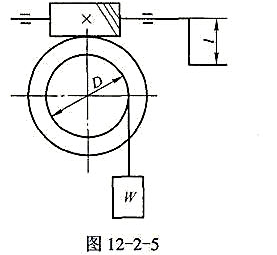
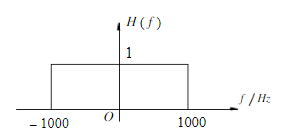
如下图所示手动绞车采用蜗杆传动,已知模数m=8mm,螺杆直径d1=80mm,蜗杆头数z1=1,蜗轮齿数z2=40,卷简直径D=20
如下图所示手动绞车采用蜗杆传动,已知模数m=8mm,螺杆直径d1=80mm,蜗杆头数z1=1,蜗轮齿数z2=40,卷简直径D=200mm。求:
(1)重物上升1m,手柄应转多少圈?
(2)若蜗杆与蜗轮齿面之间的当量摩擦因数fv=0.2,此机构是否自锁?
(3)标出重物上升时,蜗轮圆周力Ft2方向。
查看答案

 如果结果不匹配,请 联系老师 获取答案
如果结果不匹配,请 联系老师 获取答案

 更多“如下图所示手动绞车采用蜗杆传动,已知模数m=8mm,螺杆直径…”相关的问题
更多“如下图所示手动绞车采用蜗杆传动,已知模数m=8mm,螺杆直径…”相关的问题
.jpg)
















