题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
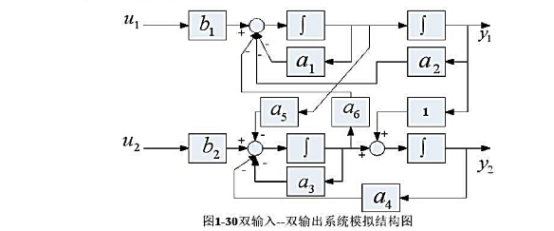
已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u的系数b(即控制列阵)为
已知差分方程为

试将其用离散状态空间表达式表示,并使驱动函数u的系数b(即控制列阵)为
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已知差分方程为
试将其用离散状态空间表达式表示,并使驱动函数u的系数b(即控制列阵)为
如果结果不匹配,请 联系老师 获取答案
 更多“已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u…”相关的问题
更多“已知差分方程为试将其用离散状态空间表达式表示,并使驱动函数u…”相关的问题
已知差分方程

其中a,b,c为正的常数,且y0>0.
(1)试证:y,>0,t=1,2...;
(2)试证:变换 将原方程化为ut的线性方程,并由此求出yt的通解;
将原方程化为ut的线性方程,并由此求出yt的通解;
(3)求方程 的解.
的解.
已知差分方程 其中a,b,c,d均为正常数,试证经代换
其中a,b,c,d均为正常数,试证经代换 ,可将方程化为关于zn的线性差分方程,并由此找出原方程的通解。
,可将方程化为关于zn的线性差分方程,并由此找出原方程的通解。
由差分方程 和非零起始条件y(-1)=1表示的离散时间因果系统,当系统输入x(n)=δ(n)时,试用递推算法求:
和非零起始条件y(-1)=1表示的离散时间因果系统,当系统输入x(n)=δ(n)时,试用递推算法求:
(1)该系统的零状态响应 (至少计算出前6个序列值);
(至少计算出前6个序列值);
(2)该系统的零输入响应(至少计算出前4个序列值).
已知离散系统差分方程表示式

(1)求系统函数和单位样值响应;
(2)若系统的零状态响应为 ,求激励信号x(n);
,求激励信号x(n);
(3)画系统函数的零、极点分布图;
(4)粗略画出幅频响应特性曲线;
(5)画系统的结构框图.
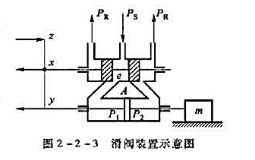
已知圆柱滑阀节流方程为
流经节流口的流量Q随油口开度e和油口前后压差(P1-P2)变化而变化。试建立其在小扰动条件下的线性方程。工作示意图如图2-2-3所示。
一阶IIR系统的差分方程为y(n)=ay(n-1)+x(n),已知在无限精度情况下,这个系统是稳定的。当在有限精度情况下实现时,对相采的结果作截尾处理,因此实际的差分方程是

式中Q[]表示截尾量化后的结果。
(a)如果信号和乘法器系数都是原码表示的,试问当有限精度实现时,是否存在形式为 的零输入极限环?请说明理由。
的零输入极限环?请说明理由。
(b)上述结果对于补码截尾仍然成立吗?为什么?