 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知伺服系统开环传递函数为设计一滞后校正装置,满足如下性能指标:(1)系统的相位裕度y≥45°;(2
已知伺服系统开环传递函数为设计一滞后校正装置,满足如下性能指标:(1)系统的相位裕度y≥45°;(2
已知伺服系统开环传递函数为
设计一滞后校正装置,满足如下性能指标:
(1)系统的相位裕度y≥45°;
(2)单位斜坡输入时,系统稳态误差小于或等于0.01.
查看答案

 如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如果结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已知伺服系统开环传递函数为
设计一滞后校正装置,满足如下性能指标:
(1)系统的相位裕度y≥45°;
(2)单位斜坡输入时,系统稳态误差小于或等于0.01.
如果结果不匹配,请 联系老师 获取答案
 更多“已知伺服系统开环传递函数为设计一滞后校正装置,满足如下性能指…”相关的问题
更多“已知伺服系统开环传递函数为设计一滞后校正装置,满足如下性能指…”相关的问题
已知系统的开环传递函数为 试完成:
试完成:
(1)判断闭环系统的稳定性;
(2)若实施中联校正,校正装置为 ,计算校正后的穿越频率ωc和相角裕量γ;
,计算校正后的穿越频率ωc和相角裕量γ;
(3)该校正装置是超前还是滞后网络?对系统动态性能指标有何改善?
(4)该校正装置对系统的静态性能有无影响?为什么?
已知单位负反馈系统开环传递函数为

试设计中联校正装置,使系统Kr≥5s-1,超调量不大于25%,调节时间不大于1s。
已知系统的开环传递函数分别为

分别采用根轨迹同伦法设计串联校正装置Ge(s),使得系统的闭环极点为s1.2=-2+j。
单位负反馈系统的开环传递函数为
若要求校正后系统的静态速度误差系数 ,并保证原主导极点位置基本不变,试用根轨迹法求滞后校正装置。
数幅频渐近曲线分别如图2-6-1中L0和L1、L2所示。并设G0(s)、Gc1(s)、Gc2(s)都没有右半平面的零、极点。现用Gc1(s)和Gc2(s)分别对系统进行串联校正。
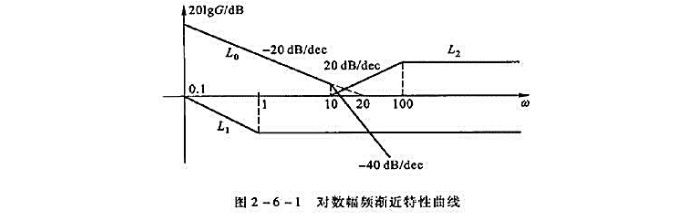
要求写出Gc1(s)G0(s),Gc2(s)G0(s)的表达式并画出它们相应的对数幅频渐近曲线,比较两种校正方案的优缺点。
设一随动系统,其开环传递函数为
如要求系统的速度稳态误差为10%,Mp≤1.5,试确定中联校正装置的参数。
设角位移伺服系统的开环模型为 ,试采用四阶参考模型法设计校正装置Ge(s),使得校正后实现下述性能指标
,试采用四阶参考模型法设计校正装置Ge(s),使得校正后实现下述性能指标
(a)静态速度误差系数Ky≥200;
(b)阶跃响应的过波时间te<04秒:
(e)阶跃响应的超调量Mp<30%;
并计算相位裕度ye的大小。
已知某单位反馈系统的开环传递函数为Gk(s)
其中,K>0。若该系统的输入为 时。其稳态输出的幅值为A,位比输入滞后90°。
时。其稳态输出的幅值为A,位比输入滞后90°。
(1)确定参数K、a;
(2)求系统的阻尼比、无阻尼固有频率和有阻尼固有频率;
(3)若输入为 确定ω为何值时能得到最大的稳态响应幅值,并求此最大幅值。
确定ω为何值时能得到最大的稳态响应幅值,并求此最大幅值。
已知一单位负反馈系统的开环传递函数为

(1)作系统的根轨迹图,并确定临界阻尼时的Kg值。
(2)求系统稳定的Kg值范围。

















